一、研究重點
1.漁用機器人應用基礎(chǔ)研究
2.漁業(yè)養(yǎng)殖機器人技術(shù)
3.漁業(yè)捕撈、加工機器人技術(shù)
二、團隊首席

諶志新,研究員,所首席科學家、副所長,全國農(nóng)業(yè)科研杰出人才、上海市領(lǐng)軍人才、國家現(xiàn)代農(nóng)業(yè)產(chǎn)業(yè)藻類技術(shù)體系崗位科學家。牽頭創(chuàng)制了全球首艘10萬噸級大型養(yǎng)殖工船“船載艙養(yǎng)”模式,養(yǎng)殖作業(yè)裝備核心人員。主持“921載人航天工程”高海況應急打撈回收系統(tǒng)裝備研制、國家重點研發(fā)計劃“深遠海大型養(yǎng)殖裝備平臺與智能養(yǎng)殖模式”、公益性(農(nóng)業(yè))行業(yè)科研專項“漁業(yè)節(jié)能關(guān)鍵技術(shù)研究與重大裝備研發(fā)”等國家和省部級項目課題10多項,研發(fā)推廣了系列標準化漁船和遠洋高效捕撈成套裝備。獲軍隊科技進步獎、全國農(nóng)牧漁業(yè)豐收獎、上海市科技進步、神農(nóng)中華農(nóng)業(yè)科技獎、中國水產(chǎn)學會范蠡獎和中國航海學會等省部級科技獎近10項,主參編專著3本,授權(quán)專利、軟著50多項,技術(shù)成果在推動漁村產(chǎn)業(yè)振興方面發(fā)揮了重要科技引領(lǐng)作用。
三、團隊建設(shè)

團隊(隸屬捕撈室)聚焦智慧漁業(yè)發(fā)展方向,主要開展?jié)O用機器人應用基礎(chǔ)研究、無人化作業(yè)系統(tǒng)研發(fā)與養(yǎng)捕加作業(yè)機器人研制,重點從事漁用機器人的共性關(guān)鍵技術(shù)、作業(yè)功能和典型場景應用等領(lǐng)域的研究。建立“首席科學家+學科帶頭人”的人才協(xié)同創(chuàng)新培養(yǎng)機制,目前共有9名科研人員,其中研究員2人,副研究員1人,專業(yè)涵蓋信號處理、算法開發(fā)、人工智能和機械結(jié)構(gòu)等學科。
四、近期的主要工作
圍繞方向1:深遠海艙-網(wǎng)環(huán)境下漁業(yè)機器人自主定位導航與底盤設(shè)計的共性關(guān)鍵技術(shù)
圍繞深遠海漁業(yè)機器人自動化、無人化的導航需求,針對水下魚-機擾動、低光照等復雜工況的挑戰(zhàn),開展?jié)O業(yè)機器人在深遠海艙-網(wǎng)場景下的自主貼附移動研究。開展場景三維測繪與重構(gòu)研究,突破深遠海艙-網(wǎng)場景地理信息提煉技術(shù);開發(fā)深遠海艙-網(wǎng)建圖與匹配定位系統(tǒng),融合機器人視覺/慣導等多源感知信息,解算機器人貼附移動的軌跡偏離度;研發(fā)機器人循跡過程中障礙物智能識別系統(tǒng)技術(shù),實現(xiàn)自主移動過程中的局部避障;開發(fā)漁業(yè)機器人自主規(guī)劃路徑的決策技術(shù),形成漁業(yè)機器人自主定位移動的導航系統(tǒng)。針對惡劣的水下環(huán)境條件,設(shè)計耐腐蝕、耐高壓和抗海水侵蝕的機器人移動底盤結(jié)構(gòu),優(yōu)化工船磁力吸附,確保機器人能夠在復雜的水下環(huán)境中自由移動和執(zhí)行任務。
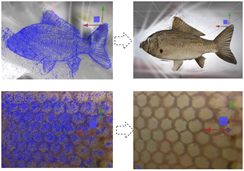

單一視角下的網(wǎng)箱魚體立體測繪與渲染成像 標志物引導的移動定位軌跡


工船磁力吸附機器人 磁力模組吸附磁場分布
圍繞方向2:深遠海養(yǎng)殖機器人魚情巡檢感知與清洗作業(yè)管理決策平臺
針對養(yǎng)殖場所全方位魚情監(jiān)測需求,研究深遠海養(yǎng)殖場景下的巡檢機器人。設(shè)計檢測魚體的多源框架模型,提取魚體動作,評估健康活躍度;引入基于跟蹤軌跡的異常動作分析方法,實現(xiàn)對魚群視頻流的實時狀態(tài)監(jiān)測。設(shè)計深度學習檢測網(wǎng)絡(luò),檢測機器人巡視過程中的艙-網(wǎng)附著物,基于清潔巡視數(shù)據(jù),在云端后臺構(gòu)建深遠海養(yǎng)殖艙-網(wǎng)全場景的附著物大數(shù)據(jù)立體展示模型。設(shè)計清洗作業(yè)機器人空化射流清洗裝置的三維模型,優(yōu)化噴嘴形狀、空間布局、射流角度,利用計算流體力學技術(shù)分析射流在水中的傳播特性,評估空化射流作業(yè)技術(shù)對生物附著物的去除效率及清潔效果;結(jié)合后臺清潔大數(shù)據(jù)觀測云平臺,綜合考慮清洗效果、能耗和經(jīng)濟性,確定適合深遠海養(yǎng)殖附著物強度的空化射流清洗強度和頻率,形成漁業(yè)機器人自主清洗決策的管理體系。


魚體動作提取 魚體移動軌跡

艙網(wǎng)附著物空化射流清洗裝備
圍繞方向3:捕撈機器人復雜動態(tài)場景下的魚體計數(shù)
圍繞活魚起捕后的自動計數(shù)需求,研究高效的智能計數(shù)系統(tǒng)。通過高分辨率攝像裝置實時捕獲活魚圖像,利用特征提取、對象檢測與深度學習算法對魚體進行識別與計數(shù),并與后臺執(zhí)行作業(yè)機構(gòu)聯(lián)動控制。為提升計數(shù)的準確性與適應性,研究不同光照、水質(zhì)等復雜環(huán)境下的圖像分割與目標跟蹤算法。為確保系統(tǒng)能夠在魚群密集或部分魚體重疊遮擋情況下的高識別率,在數(shù)據(jù)處理方面,結(jié)合空間深度信息,構(gòu)建距離梯度-閾值引導的注意力學習機制。起捕計數(shù)系統(tǒng)支持與后臺管理平臺的無縫對接,通過大數(shù)據(jù)技術(shù)實現(xiàn)計數(shù)信息的實時上傳和后臺分析決策,助力漁業(yè)起捕的數(shù)字化管理與決策優(yōu)化。


真空吸魚泵 魚體轉(zhuǎn)運計數(shù)軟件


 滬公網(wǎng)安備 31011002002435號
滬公網(wǎng)安備 31011002002435號